1. 1.8 Inch 128*160 Serial SPI TFT LCD Module Display
- 1.8인치 128×160 해상도의 TFT LCD 모니터




(1) 핀 연결
| 1.8인치 TFT LCD 모듈 | 아두이노 UNO | 비고 |
|---|---|---|
| SCK | 13 | |
| SDA | 11 | |
| A0 | 9 | |
| RESET | 8 | |
| CS | 10 | |
| GND | GND | |
| CC | VCC | +5V, +3.3V 모두 가능 |
| LED+ | 3 (PWM) | PWM 핀이면 아무나 가능 |
| LED- | GND | |
| SD MISO | 12 | |
| SD SCK | 13 | LCD의 SCK와 동일 |
| SD MOSI | 11 | LCD의 SDA와 동일 |
| SD CS | 4 |
(2) 소스 코드
소스코드의 길이가 길어 다른 페이지의 링크로 대신한다.
LCD 테스트 소스 코드 바로가기
2. 자이로/가속도/고도/나침반 센서
- 드론 제작시 가장 필요한 항목.
- 중심잡고 이동 방향/고도를 알기위해 필요한 센서.
(1) 센서 스팩
| 항목 | 내용 |
|---|---|
| 모델명 | GY-89 |
| 자이로 센서 칩 | 10DOF |
| 가속도 센서 칩 | L3GD20 |
| 고도계 센서 칩 | BMP-180 |
| 지자계 센서 칩 | LSM303D |
센서의 기능
- Dimensions: 22 mm × 17 mm
- Operating voltage: 2.5 V to 5.5 V
- Supply current: 8mA
- Output format (I2C/SPI):
- Gyro: one 16-bit reading per axis
- Accelerometer: one 16-bit reading per axis
- Magnetometer: one 16-bit reading per axis
- Barometer: 24-bit pressure reading (I2C only)
- Gyro: ±245, ±500, or ±2000°/s
- Accelerometer: ±2, ±4, ±6, ±8, or ±16 g
- Magnetometer: ±2, ±4, ±8, or ±12 gauss
- Barometer: 300hPato 1110hPa
(2) 사진


(3) 핀 연결
| 자이로 센서 모듈 | 아두이노(Uno/Pro Mini) | 비고 |
|---|---|---|
| SCL | A5 | |
| SDA | A4 | |
| GND | GND | |
| VIN | 5V |
(4) 테스트용 소스코드
소스코드의 길이가 길어 다른 페이지의 링크로 대신한다.
자이로 센서 모듈 테스트 코드 바로가기
3. 초음파 거리 센서
(1) 센서
1) 특징
| 항목 | 내용 |
|---|---|
| 모델명 | HC-SR04 |
| 동작 전압 | 5V |
| 소비 전류 | 15mA |
| 동작 주파수 | 40KHz |
| 측정 거리 | 2 cm ~ 4 m |
| 측정 각도 | 15도 (degree) |
| 트리거 입력 신호 | 10㎲ TTL Pulse |
| 응답 출력 신호 | 거리에 비례하는 TTL Pulse |
| 크기 | 45 * 20 * 15 mm |
| 라인 구성 | Vcc, Trig, Echo, GND |
2) 사진

(2) 핀 연결
| HC-SR04 초음파 센서 | 아두이노(Uno/Pro Mini) | 비고 |
|---|---|---|
| VCC | 5V | |
| TRIG | 디지털 7번핀 | |
| ECHO | 디지털 6번핀 | |
| GND | GND |
(3) 테스트용 소스코드
#include <Ultrasonic.h> int pinTrig = 7; int pinEcho = 6; Ultrasonic ultrasonic(pinTrig,pinEcho); void setup() { Serial.begin(9600); } void loop() { Serial.println("Distance(cm) = " + String(ultrasonic.Ranging(CM)) ); delay(1000); }
(4) 참고
4. 온습도 센서
(1) 센서
1) 특징
| 항목 | 내용 |
|---|---|
| 모델명 | KY-015 |
| 센서 칩 모델 | DHT11 |
2) 사진

(2) 핀 연결
| HC-SR04 초음파 센서 | 아두이노(Uno/Pro Mini) | 비고 |
|---|---|---|
| VCC | 5V | |
| DATA | 디지털 2번핀 | |
| GND | GND |
(3) 테스트용 소스코드
소스코드의 길이가 길어 다른 페이지의 링크로 대신한다.
DHT11 온습도 센서 테스트용 소스 코드
(4) 참고
5. GPS 센서
(1) 센서
1) 특징
| 항목 | 내용 |
|---|---|
| 모델명 | GY-NEO6MV2 |
| 센서 칩 | NEO-6M |
| 크기 | 36mm X 24mm |
2) 스팩
- U-blox/u-blox NEO-6M GPS module with antenna and build-in EEPROM
- This module is compatible with APM2 and APM2.5, and EEPROM can save all your configuration data.
- Interface: RS232 TTL
- Power: 3-5v
- Baudrate default:9600bps
3) 사진

(2) 핀 연결
| NEO-6M GPS 센서 | 아두이노(Uno/Pro Mini) | 비고 |
|---|---|---|
| VCC | 5V | |
| GND | GND | |
| RX | 디지털 2 | |
| TX | 디지털 3 |
(3) 테스트용 소스코드
소스코드의 길이가 길어 다른 페이지의 링크로 대신한다.
GPS 센서 테스트용 소스 코드
6. 트랜지스터 배열(ULN2003) - DC Motor Driver (모터 제어)
(1) TR Array
1) 특징
| 항목 | 내용 |
|---|---|
| 모델명 | ULN2003 |
| 제조사 | 중국 |
2) 스팩
- 7개의 회로를 입출력 별도 사용
- 2 개이상 Logic 같이 묶어 연동 사용가능
- 종류에따라 입력 구동전압 다름 ( 전류도 차이 )
- 최대사용전압 제한 ( P,F–>30V ) ( AP,AF–>50V )
- 1개 CH 당 최대 전류 500mA ( 전체 합산 전류는 제한 )
- P= I*V 에 의해 전류 전압 전력 등 상호 최대 한계값은 넘지 못한다
- 출력에 다른 전원의 부하사용시는 제일 높은 전압을 COMMAND라인에 접속 또는 OPEN
- 2.8V~24V 까지 입력핀에 인가가능
3) 사진

(2) 핀 연결
| ULN2003 칩 | 아두이노(Uno/Pro Mini) | 모터 연결 | 비고 |
|---|---|---|---|
| IN 1 | 11 | ||
| GND | GND | ||
| COM | 5V | ||
| OUT1 | - | ||
| + | (외부 전원 사용 추천) |
(3) 테스트용 소스코드
int motor = 11; void setup() { pinMode(motor, OUTPUT); } void loop() { digitalWrite(motor, HIGH); delay(1000); digitalWrite(motor, LOW); delay(1000); }
7. ESP8266으로 I2C LCD를 제어하기

핀 연결
| I2C LCD | ESP8266 12E | 비고 |
|---|---|---|
| GND | GND | |
| VCC | VIN | |
| SDA | D2 (GPIO 4) | |
| SCL | D1 (GPIO 5) |
(1) I2C LCD의 주소 값 가져오기
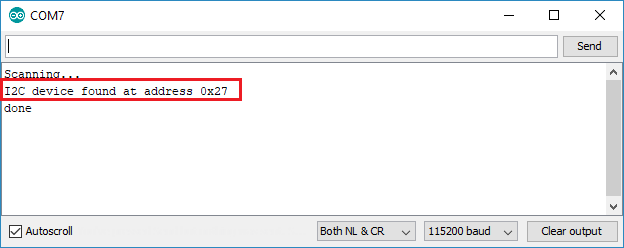
LCD에 글자를 출력하기 위해서 먼저 LCD의 I2C 주소를 알아야한다. ESP8266과 선을 연결하고 I2C 스캐너 스캐치를 업로드한다.
/********* Rui Santos Complete project details at https://randomnerdtutorials.com *********/ #include <Wire.h> void setup() { Wire.begin(); Serial.begin(115200); Serial.println("\nI2C Scanner"); } void loop() { byte error, address; int nDevices; Serial.println("Scanning..."); nDevices = 0; for(address = 1; address < 127; address++ ) { Wire.beginTransmission(address); error = Wire.endTransmission(); if (error == 0) { Serial.print("I2C device found at address 0x"); if (address<16) { Serial.print("0"); } Serial.println(address,HEX); nDevices++; } else if (error==4) { Serial.print("Unknow error at address 0x"); if (address<16) { Serial.print("0"); } Serial.println(address,HEX); } } if (nDevices == 0) { Serial.println("No I2C devices found\n"); } else { Serial.println("done\n"); } delay(5000); }
제대로 동작이 되면 아래 그림과 같이 주소값을 얻을 수 있다.
(2) I2C LCD에 문자열 출력
이제 “HELLO”를 출력하는 코드를 업로드 해보자.
/********* Rui Santos Complete project details at https://randomnerdtutorials.com *********/ #include <LiquidCrystal_I2C.h> // set the LCD number of columns and rows int lcdColumns = 16; int lcdRows = 2; // set LCD address, number of columns and rows // if you don't know your display address, run an I2C scanner sketch LiquidCrystal_I2C lcd(0x27, lcdColumns, lcdRows); void setup(){ // initialize LCD lcd.init(); // turn on LCD backlight lcd.backlight(); } void loop(){ // set cursor to first column, first row lcd.setCursor(0, 0); // print message lcd.print("Hello, World!"); delay(1000); // clears the display to print new message lcd.clear(); // set cursor to first column, second row lcd.setCursor(0,1); lcd.print("Hello, World!"); delay(1000); lcd.clear(); }
8. 트랜지스터 DC 모터 제어

9. 가변 저항기

ESP8266과 연결하기
가변 저항기를 ESP8266과 연결하는 방법은 그냥 연결하면 된다.
10. 2극 IR 수신기

ESP8266과 연결하기
- 아나로그 센서이기 때문에 ADC (A0)에 연결한다.
- PULL DOWN 저항을 이용해서 회로를 구성한다.

11. 마이크로 서보 모터

- 필자가 갖고 있는 Micro Servo Motor는 갈/빨/주 3개의 선으로 되어있다.
- 움직이는 각도 : 0도~180도
- 갈색 = GND
- 빨간 = VCC (3.3V 혹은 5V)
- 주황 = PWM

1) ESP8266 12E와 연결하기
핀 연결
| Micro Servo Motor | ESP8266 12E |
|---|---|
| 갈색 | GND |
| 빨간색 | VCC (3.3VDC) |
| 주황색 | GPIO14 (PWM) |
연결 회로도

12. Gesture Sensor
알리에서 구입한 APDS-9930 Guesture 센서.

1) 핀 배열 설명
| 핀 이름 | 설명 |
|---|---|
| VL | Optional power to the IR LED if PS jumper is disconnected. Must be 3.0 – 4.5V |
| GND | Ground |
| VCC | Power to the sensor. Must be 2.4 – 3.6V |
| SCL | I²C clock |
| SDA | I²C Data |
| INT | External interrupt. Pulled low by the sensor on interrupt event. |
2) 사용할 라이브러리
본 Sensor를 사용하기 위해 APDS9930 Class Library (Davide Depau) 를 이용한다.
여기를 클릭 후 Github 홈페이지에서 파일을 다운받는다.
예제도 제공되니 예제를 참고하도록 한다.
유의 사항
APDS-9930 모듈을 사용해 본 결과, 그대로 사용할 경우 정상 동작하지 않았다.

대신 PS, PU 를 납땜한 후 정상 동작이 되었다.
사용한 라이브러리는 Dayide Depau의 APDS9930 Lirary를 이용하였다.
3) 아두이노에서 사용하기
(1) 아두이노 UNO에 연결
| 아두이노 | APDS-9930 Board |
|---|---|
| 3.3V | VCC |
| GND | GND |
| A4 | SDA |
| A5 | SCL |
| GPIO2 | INT |
(2) ESP8266 12E에 핀 연결
| ESP8266 | APDS-9930 Board |
|---|---|
| 3.3V | 3.3VDC |
| GND | GND |
| D2 (GPIO 4) | SDA |
| D1 (GPIO 5) | SCL |
| INT | X |
13. CDS 조도 측정기 (Photoresistor Sensor)
CDS 조도 측정기는 아날로그 센서이다.
1) 아두이노 연결

14. RCWL-0516 레이더 센서
1) 특징
RCWL-0516 칩을 사용합니다.
마이크로 웨이브를 이용해 센싱을 합니다.
동작 전압 3.3v
CDS밝기센서 장착가능
뒷면의 점퍼를 통해 출력시간 및 감도 조정가능
측정 거리 5m
얇은 물체는 어느정도 통과가 가능합니다.
감지 방향은 위와 같습니다.

2) 아두이노 연결
| 아두이노 | RCWL-0516 | 비고 |
|---|---|---|
| 디지털 핀 | OUT | HIGH(감지), LOW(보통상태) |
| 5V | VIN | 5V 전원 사용 시 |
| 3.3V | 3.3V | 3.3V 전원 사용 시 |
| GND | GND |
3) 참고 사이트
4) 핀배열

15. 피에조 부저 (PIEZO SPEAKER)
1) 외관

2) 아두이노 연결 방법
| 아두이노 | 부저 | 비고 |
|---|---|---|
| PWM 출력 핀 | + | TONE 출력 |
| GND | - |
3) 예제 코드
const int buzzer = 3; void setup() { // put your setup code here, to run once: pinMode(buzzer, OUTPUT); } void loop() { // put your main code here, to run repeatedly: tone(buzzer, 1000); // Send 1KHz sound signal... delay(1000); // ...for 1 sec noTone(buzzer); // Stop sound... delay(1000); // ...for 1sec }
16. IR 수신기

1. 아두이노 배선

2. 아두이노 테스트 코드
//------------------------------------------------------------------------------ // Include the IRremote library header // #include <IRremote.h> //------------------------------------------------------------------------------ // Tell IRremote which Arduino pin is connected to the IR Receiver (TSOP4838) // int recvPin = 11; IRrecv irrecv(recvPin); //+============================================================================= // Configure the Arduino // void setup ( ) { Serial.begin(9600); // Status message will be sent to PC at 9600 baud irrecv.enableIRIn(); // Start the receiver } //+============================================================================= // Display IR code // void ircode (decode_results *results) { // Panasonic has an Address if (results->decode_type == PANASONIC) { Serial.print(results->address, HEX); Serial.print(":"); } // Print Code Serial.print(results->value, HEX); } //+============================================================================= // Display encoding type // void encoding (decode_results *results) { switch (results->decode_type) { default: case UNKNOWN: Serial.print("UNKNOWN"); break ; case NEC: Serial.print("NEC"); break ; case SONY: Serial.print("SONY"); break ; case RC5: Serial.print("RC5"); break ; case RC6: Serial.print("RC6"); break ; case DISH: Serial.print("DISH"); break ; case SHARP: Serial.print("SHARP"); break ; case JVC: Serial.print("JVC"); break ; case SANYO: Serial.print("SANYO"); break ; case MITSUBISHI: Serial.print("MITSUBISHI"); break ; case SAMSUNG: Serial.print("SAMSUNG"); break ; case LG: Serial.print("LG"); break ; case WHYNTER: Serial.print("WHYNTER"); break ; case AIWA_RC_T501: Serial.print("AIWA_RC_T501"); break ; case PANASONIC: Serial.print("PANASONIC"); break ; case DENON: Serial.print("Denon"); break ; } } //+============================================================================= // Dump out the decode_results structure. // void dumpInfo (decode_results *results) { // Check if the buffer overflowed if (results->overflow) { Serial.println("IR code too long. Edit IRremoteInt.h and increase RAWBUF"); return; } // Show Encoding standard Serial.print("Encoding : "); encoding(results); Serial.println(""); // Show Code & length Serial.print("Code : "); ircode(results); Serial.print(" ("); Serial.print(results->bits, DEC); Serial.println(" bits)"); } //+============================================================================= // Dump out the decode_results structure. // void dumpRaw (decode_results *results) { // Print Raw data Serial.print("Timing["); Serial.print(results->rawlen-1, DEC); Serial.println("]: "); for (int i = 1; i < results->rawlen; i++) { unsigned long x = results->rawbuf[i] * USECPERTICK; if (!(i & 1)) { // even Serial.print("-"); if (x < 1000) Serial.print(" ") ; if (x < 100) Serial.print(" ") ; Serial.print(x, DEC); } else { // odd Serial.print(" "); Serial.print("+"); if (x < 1000) Serial.print(" ") ; if (x < 100) Serial.print(" ") ; Serial.print(x, DEC); if (i < results->rawlen-1) Serial.print(", "); //',' not needed for last one } if (!(i % 8)) Serial.println(""); } Serial.println(""); // Newline } //+============================================================================= // Dump out the decode_results structure. // void dumpCode (decode_results *results) { // Start declaration Serial.print("unsigned int "); // variable type Serial.print("rawData["); // array name Serial.print(results->rawlen - 1, DEC); // array size Serial.print("] = {"); // Start declaration // Dump data for (int i = 1; i < results->rawlen; i++) { Serial.print(results->rawbuf[i] * USECPERTICK, DEC); if ( i < results->rawlen-1 ) Serial.print(","); // ',' not needed on last one if (!(i & 1)) Serial.print(" "); } // End declaration Serial.print("};"); // // Comment Serial.print(" // "); encoding(results); Serial.print(" "); ircode(results); // Newline Serial.println(""); // Now dump "known" codes if (results->decode_type != UNKNOWN) { // Some protocols have an address if (results->decode_type == PANASONIC) { Serial.print("unsigned int addr = 0x"); Serial.print(results->address, HEX); Serial.println(";"); } // All protocols have data Serial.print("unsigned int data = 0x"); Serial.print(results->value, HEX); Serial.println(";"); } } //+============================================================================= // The repeating section of the code // void loop ( ) { decode_results results; // Somewhere to store the results if (irrecv.decode(&results)) { // Grab an IR code dumpInfo(&results); // Output the results dumpRaw(&results); // Output the results in RAW format dumpCode(&results); // Output the results as source code Serial.println(""); // Blank line between entries irrecv.resume(); // Prepare for the next value } }
3. IR 리모콘 관련 사이트
17. Analogue PH Tester
1) 스팩/사양
- Heating voltage: 5 plusmn 0.2V (AC middot DC)
- Working current: 5-10mA
- Detectable concentration range: PH0-14
- Detection Temperature range: 0-80 ℃
- Response time: le5S
- Settling Time: le60S
- Component Power: le0.5W
- Working temperature: -10 ~ 50 ℃ (nominal temperature 20 ℃)
- Humidity: 95% RH (nominal humidity 65% RH)
- Module Size: 42mm times 32mm times 20mm
- Output: analog voltage signal output
- With 4pcs M3 Mounting Holes
2) 외관/핀배열

